串口通信����,作為外設與計算機之間數據傳輸的經典方式,憑借其簡潔的硬件需求與較低成本����,在各類應用場景中占據著不可或缺的地位���。盡管它的傳輸速度相對較慢����,但其傳輸距離可從幾米延伸至數千米�,能夠滿足多樣化的遠距離通信需求。接下來,讓我們深入探索串口通信協議的各個方面����。
串口通信的數據格式

串口通信的數據格式是確保信息準確傳輸的核心要素����。一個完整的串口數據幀包含起始位�、數據位、校驗位、停止位以及波特率等關鍵參數�。
起始位
起始位如同數據傳輸旅程的出發信號���,以持續一個 bit 時間的邏輯 0 電平作為標識�。它的作用是讓接收端能夠與發送端的數據時鐘同步�,確保數據傳輸的精準起始。例如����,在一個基于 Arduino 的環境監測項目中���,傳感器通過串口向 Arduino 主控板傳輸溫度�、濕度數據時����,起始位使得 Arduino 能夠準確捕捉到數據傳輸的開始時刻����,為后續準確接收數據奠定基礎。
數據位
緊跟起始位之后的數據位�,承載著串口通信的核心有效信息�。通信雙方可根據實際需求約定數據位的位數���,常見的是 8 個 bit���,傳輸時遵循低位先傳�、高位后傳的原則。以 ASCII 碼字符傳輸為例���,8 位數據位恰好能夠完整表示一個字符信息,從而實現字符的準確傳輸���。
校驗位(可選)
校驗位猶如數據傳輸過程中的 “質量監督員”�,用于實施奇校驗或偶校驗�,以確保數據傳輸的準確性。它通過調整邏輯高位的數量����,能夠有效識別并糾正傳輸過程中可能出現的錯誤����。在對數據準確性要求極高的工業自動化生產線上����,校驗位就發揮著關鍵作用,例如在電機轉速���、溫度等關鍵參數的傳輸過程中,通過校驗位可及時發現并糾正因電磁干擾等因素導致的數據錯誤,保障生產線的穩定運行�。
停止位
停止位標志著一個字符傳輸的結束���,它可以是 1 位、1.5 位或 2 位����,以邏輯 1 電平呈現�。其功能類似比賽的終點線���,讓接收端能夠明確識別數據幀的邊界�。在大多數常見的串口通信應用場景中,1 位停止位是較為普遍的設置���。
空閑位
在字符傳輸的間隙,傳輸線路處于空閑狀態�,表現為高電平���,這就是空閑位����。它為下一個字符的傳輸做好準備����,如同運動員在比賽間隙調整狀態,等待下一次起跑指令���。
波特率
波特率作為衡量串口通信速率的關鍵指標,定義了每秒傳輸的二進制位數���。例如,當波特率設定為 9600 時���,意味著每秒可傳輸 9600 個二進制位。在不同的應用場景中����,需要依據實際需求合理選擇波特率。在簡單的傳感器數據采集場景中,9600 的波特率通常足以滿足數據傳輸需求���;然而,在高速數據采集與傳輸的場合,如高清視頻監控數據的串口傳輸,可能就需要更高的波特率�,如 115200 甚至更高����,以確保數據的實時性和完整性���。
電平標準:TTL 與 RS - 232 的差異化應用
串口通信的電平標準對其傳輸距離和抗干擾能力起著決定性作用����。
TTL 標準
TTL 標準在電子電路內部應用廣泛,以 5V 表示邏輯 1,0V 表示邏輯 0���。它就像電子設備內部的 “通用語言”,適用于短距離、低干擾的通信場景����,例如在單片機開發板內部各個模塊之間的串口通信����,TTL 標準能夠高效�、穩定地實現數據傳輸。
RS - 232 標準
RS - 232 標準則通過 - 15V 表示邏輯 1����, + 15V 表示邏輯 0�,這種較大的電壓差賦予了它更強的遠距離傳輸能力和抗干擾能力,如同一位能夠長途跋涉且抵御外界干擾的 “信使”����,適用于需要長距離傳輸數據的場合�。在計算機與外部調制解調器的通信中����,RS - 232 標準就發揮著重要作用����,確保數據在較長距離傳輸過程中的準確性和穩定性。
串口通信方式:從單雙工到 RS 系列標準的演進
串口通信方式歷經從單雙工到全雙工的發展歷程,形成了 RS232����、RS422�、RS485 等多種通信標準�。
RS232
RS232 作為 IBM - PC 及其兼容機的串行連接標準,采用全雙工通信模式,需要地線����、發送線����、接收線三條線����。其點對點的通信模式限制了通信距離,最遠可達 50 英尺����,但在早期�,它廣泛應用于鼠標���、打印機等外設與計算機的連接����。例如,在早期的辦公場景中,針式打印機與計算機之間通常通過 RS232 接口進行連接,實現文檔的打印輸出����。
RS422
Apple 的 Macintosh 計算機采用的串口連接標準 RS422,同樣采用全雙工通信方式���,不過它擁有 4 根信號線,支持數據的同時收發�。其差分信號傳輸方式大大增強了抗噪聲能力����,最大傳輸距離可達 4000 英尺(約 1219 米)���,最大傳輸速率達 10Mb/s���,使其在工業環境中表現出色�。在工業自動化生產線的數據傳輸中,RS422 能夠有效保障數據在復雜電磁環境下的穩定傳輸�,確保生產流程的準確控制���。
RS485
RS485 采用半雙工通信方式�,通過平衡發送和差分接收�,具備出色的抗噪能力和多設備連接能力。其傳輸距離可達數千米����,廣泛應用于需要長距離����、多設備通信的場景����,如工業現場的分布式控制系統。例如�,在大型工廠的車間內����,多個傳感器、執行器通過 RS485 總線連接����,實現數據的集中采集與控制指令的分散傳輸。
串口通信問題排查
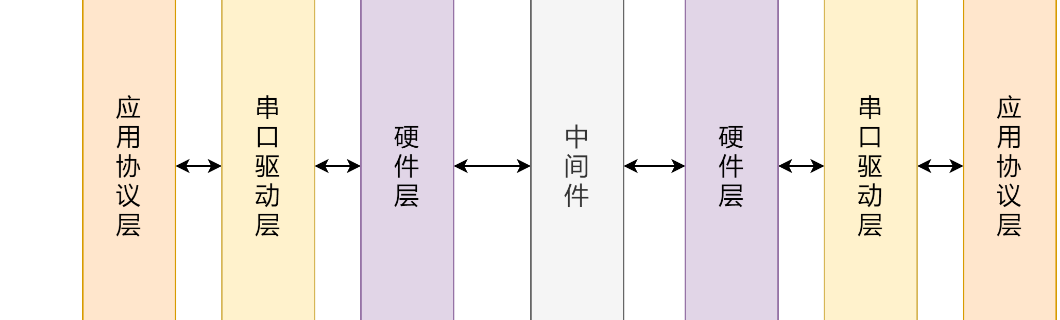
在實際應用中����,串口通信可能會遇到各種問題�,系統的排查流程對于快速定位和解決問題至關重要���。
中間件檢查
首先要確保導線連接正常���,這是數據能夠順利傳輸的基礎�。仔細檢查發送端與接收端之間的物理連接,確保每一根導線都連接牢固且正確���。例如,在連接傳感器與微控制器時�,要檢查杜邦線是否插緊�,有無松動或接觸不良的情況����,因為哪怕是輕微的接觸不良都可能導致數據傳輸失敗。
硬件層排查
利用邏輯分析儀���、示波器等專業工具���,檢測發送端�、接收端在發送�、接收、空閑時的引腳波形及電壓是否正常���。若波形出現變形、失真或電壓異常���,就需要請專業的硬件工程師協助排查�。例如,當使用示波器觀察到發送端的波形出現不規則抖動時,可能意味著硬件電路中的某個元件,如電容���、電阻等出現了故障,需要進一步檢測和更換。
串口驅動層驗證
若硬件檢查無異常���,但發送端仍然沒有波形輸出,此時需要檢查串口驅動配置是否正確。通過回環測試,并利用簡單例程排除變量干擾,以確保驅動層的正確性�。
應用協議層校驗
在自發自收驗證無誤后�,需要仔細檢查雙方的通信協議及串口配置參數�,如波特率、校驗位等是否一致�。同時�,要注意以下幾點:
使用帶屏蔽線����,并嚴格按照接線規范進行接線,必要時進行接地處理,以增強抗干擾能力�。例如����,在存在強電磁干擾的工業環境中�,使用屏蔽線并良好接地能夠有效減少干擾對數據傳輸的影響,確保數據的準確性。
充分考慮波特率誤差累積問題���,避免因報文過長導致亂碼或通信失敗。在長距離、大數據量傳輸時�,波特率的微小誤差可能會隨著時間累積�,從而影響數據的正確接收���。
在干擾環境下�,合理采用奇校驗或偶校驗,或者利用更復雜的數據校驗協議,如 CRC 校驗等���,確保數據傳輸的準確性。